LED岦偗掕揹棳IC NJW4616偵偮偄偰
2016擭11寧27擔
偙偙偱愢柧偟偨捠傝丄LED偺弴曽岦揹棳偼弴曽岦揹埑偵晀姶偱偁傝丄揹棳惂尷掞峈偱堦掕偺弴曽岦揹棳傪摼傞偺偼擄偟偄丅壛偊偰僷儚乕LED偺応崌丄揹棳惂尷掞峈偺敪擬傗僄僱儖僊乕儘僗偑柍帇偱偒側偄丅
僷儚乕LED岦偗掕揹棳夞楬偼廐寧揹巕偐傜壗庬椶偐擖庤偱偒傞偑丄偙偺夞楬偼弌椡揹棳傗PWM偺duty乮僨儏乕僥傿乕乯斾傪奜晹偐傜僐儞僩儘乕儖偱偒側偄偨傔丄擟堄偺怓傪慖戰壜擻側儁儞儔僀僩偺傛偆側梡搑偵偼巊梡偱偒側偄丅
揹棳抣偺攇崅抣偼堦掕丄duty斾偼奜晹擖椡偱惂屼壜擻側IC丄儌僕儏乕儖偑側偄偐偲扵偟偨偲偙傠丄廐寧偱尒偮偐偭偨丅怴擔杮柍慄偺IC丄NJW4616偩丅憗懍擖庤偟丄朷傒偺摦嶌偲側傞偐挷傋偨
偙偺IC偺摿惈偼埲壓偺捠傝丅
|
1丒揹尮VDD偼2.5V乣40V
2丒弌椡揹棳偼I_LED偼20mA乣300mA偱丄恾2塃壓偺幃偵帵偡傛偆偵0.2V/Rs偱寛掕偝傟傞
3丒弌椡揹埑偼40V埲撪偁傞偄偼揹尮揹埑埲撪側偺偱丄暋悢偺LED傪捈楍偵愙懕偟偨夞楬偱傕巊梡偱偒傞
4丒I_LED偼EN/PWM抂巕偑ON偺応崌偺傒揹棳偑棳傟傞丅
|
4偼偙偺IC偺嵟戝偺摿挜丅忋弎偺偛偲偔丄昅幰偑朷傫偱偄偨婡擻丅2偵偮偄偰丄嵟戝揹棳偵偮偄偰偼僷儚乕LED1屄嬱摦偵廫暘側抣偩丅300mA棳偟偨偄応崌丄Rs偼0.2/0.3=0.667兌偲側傝丄惛搙偑崅偄掞峈偑昁梫偵側傝偦偆偩丅
偙偺IC偼昞柺幚憰僷僢働乕僕SOT89側偺偑拲堄揰丅恾1偵帵偡傛偆偵丄2.54mm僺僢僠偺儐僯僶乕僒儖婎斅偱廲墶3屄暘偺儂乕儖傪巊梡偟偰偼傫偩晅偗壜擻丅婎斅傊偺捈愙偼傫偩晅偗傪旔偗傞側傜丄廐寧偺曄姺婎斅傪巊梡偡傞偲傛偄偩傠偆丅偄偢傟偵偟偰傕丄IC杮懱偺悺朄偑彫偝偄偺偱偼傫偩晅偗偵婍梡偝偑昁梫丅
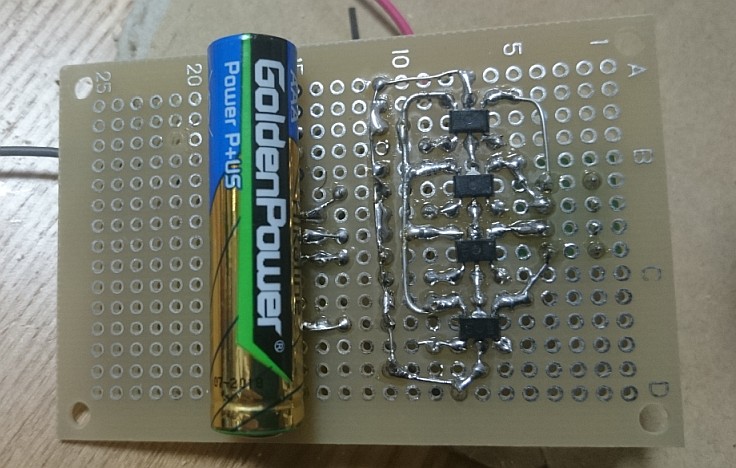
恾1丂2.54僺僢僠婎斅偵捈愙偼傫偩晅偗偟偨4屄偺NJW4616乮嵍偼扨巐姡揹抮乯
崱夞偺應掕偱巊梡偟偨夞楬偱偁傞丄NJW4616偺墳梡夞楬椺傪恾2偵帵偡丅
崱夞偺應掕偱巊梡偟偨夞楬偱偁傞丄NJW4616偺墳梡夞楬椺傪恾2偵帵偡丅
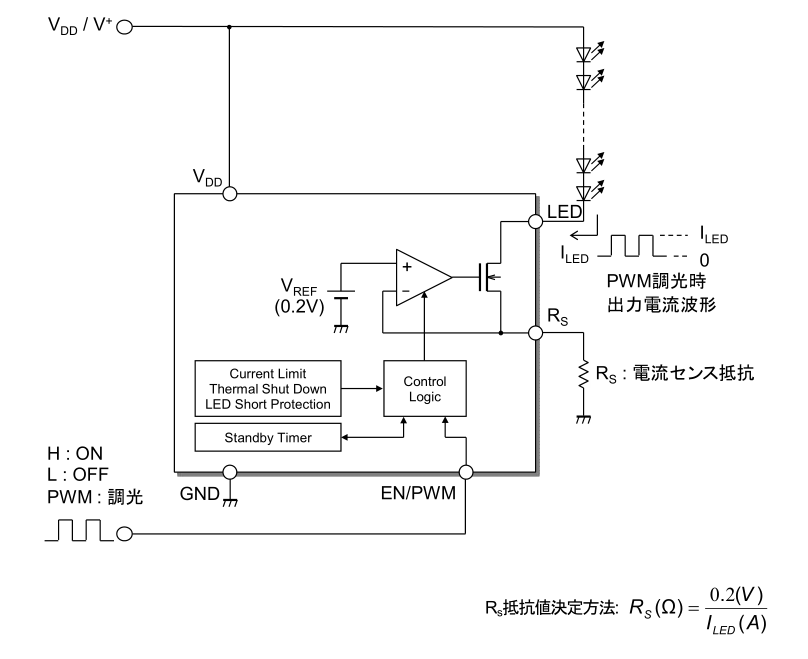
恾2丂LED岦偗掕揹棳夞楬椺
崱夞偺應掕忦審偼壓婰偲偟偨丅
弌椡揹棳攇宍I_LED傪恾3偵帵偡丅
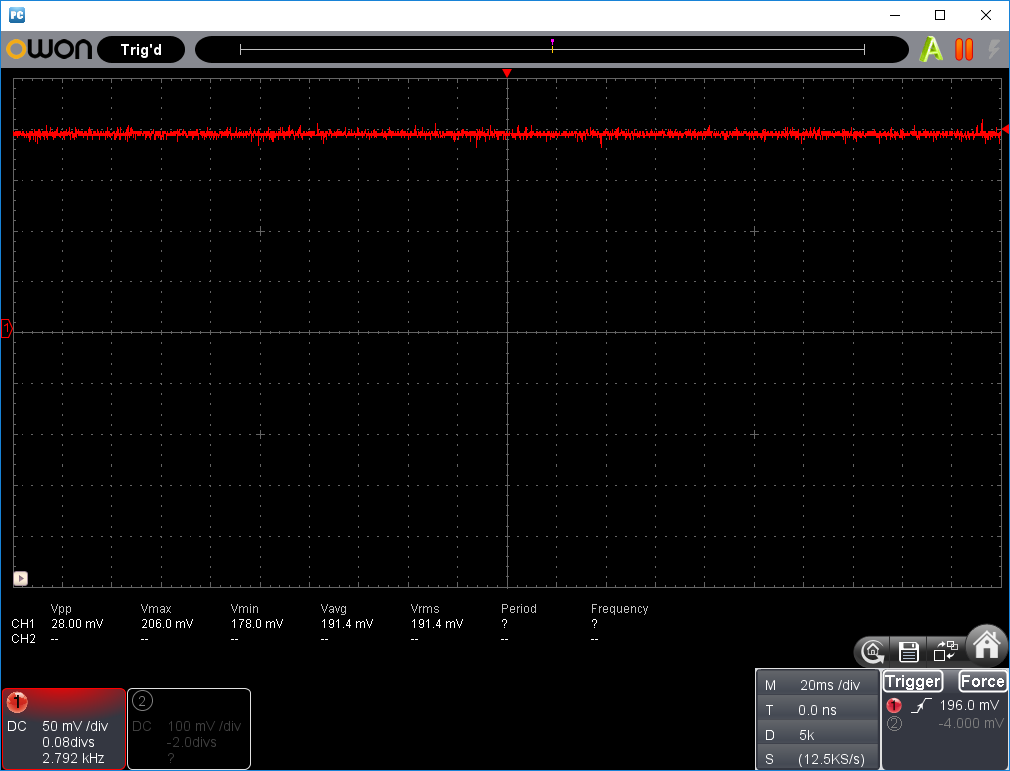
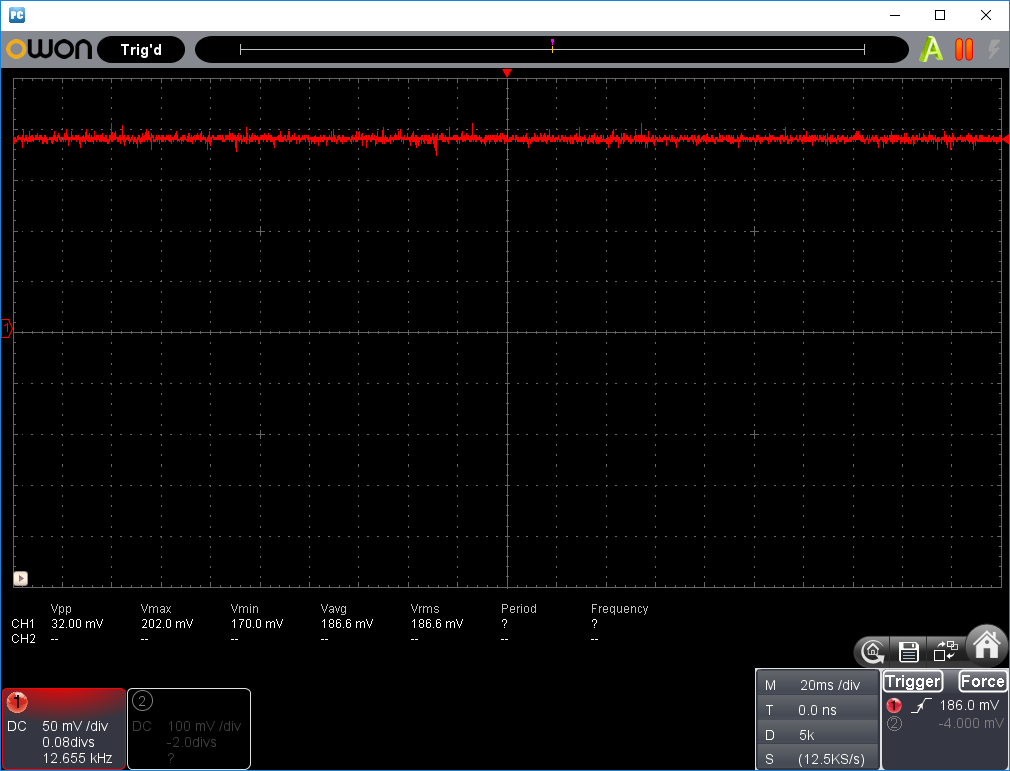
恾3-1丂VDD=5V偺偲偒偺弌椡揹棳攇宍 乮廲幉丗50mV/div丂墶幉丗20ms/div乯
 乮50mV/div乯
乮50mV/div乯
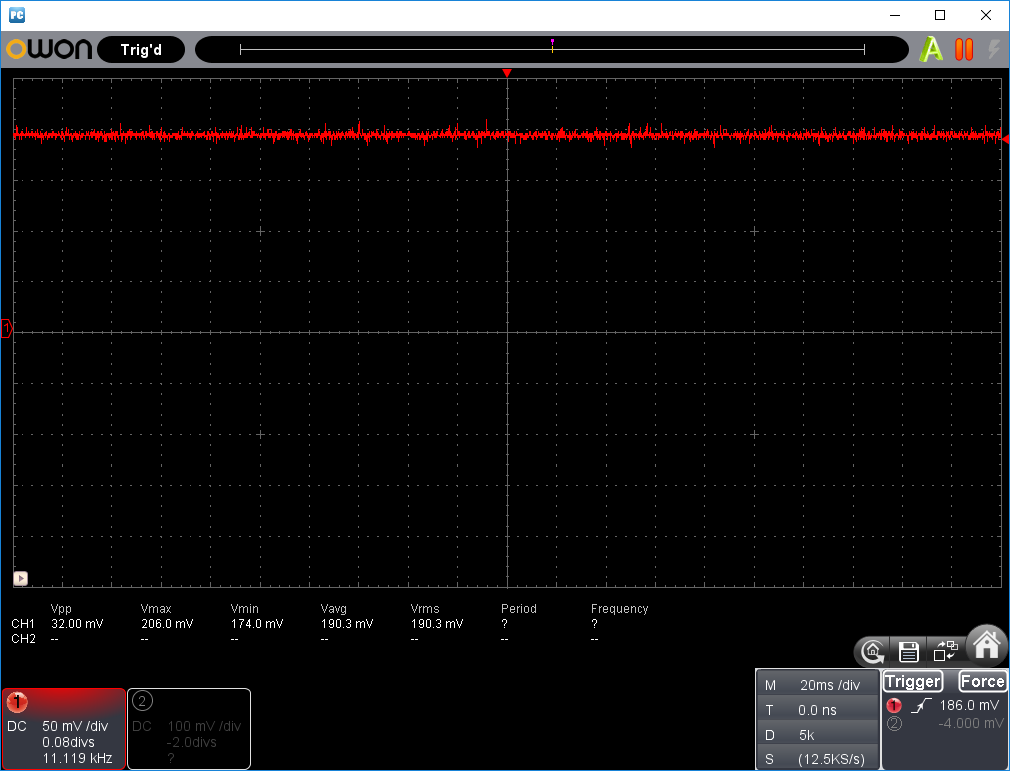
恾3-2丂VDD=10V偺偲偒偺弌椡揹棳攇宍 乮廲幉丗50mV/div丂墶幉丗20ms/div乯
恾3-3丂VDD=15V偺偲偒偺弌椡揹棳攇宍 乮廲幉丗50mV/div丂墶幉丗20ms/div乯
恾3-4丂VDD=20V偺偲偒偺弌椡揹棳攇宍 乮廲幉丗50mV/div丂墶幉丗20ms/div乯
恾3-1乣3-3偵帵偡捠傝丄VDD偑15V埲壓偱偼弌椡揹棳偼廲4div偱堦掕側偺偱攇崅抣偼200mA偱堦掕偩丅僲僀僘傕彮側偄丅偨偩丄恾3-4偵帵偡傛偆偵VDD偑20V偺応崌丄duty斾偑1:1偱10Hz掱搙偱LED偑揰柵偟偨丅偍偦傜偔丄IC偺敪擬偵傛偭偰帺摦弌椡幷抐偑摥偄偨偲巚傢傟傞丅(幚嵺丄IC偵怗傟傞偲偐側傝擬偐偭偨)丂僷儚乕LED偵掕揹棳傪棳偡応崌丄揹尮揹埑偼10V埲撪偵梷偊傞偲埨慡偦偆偩丅
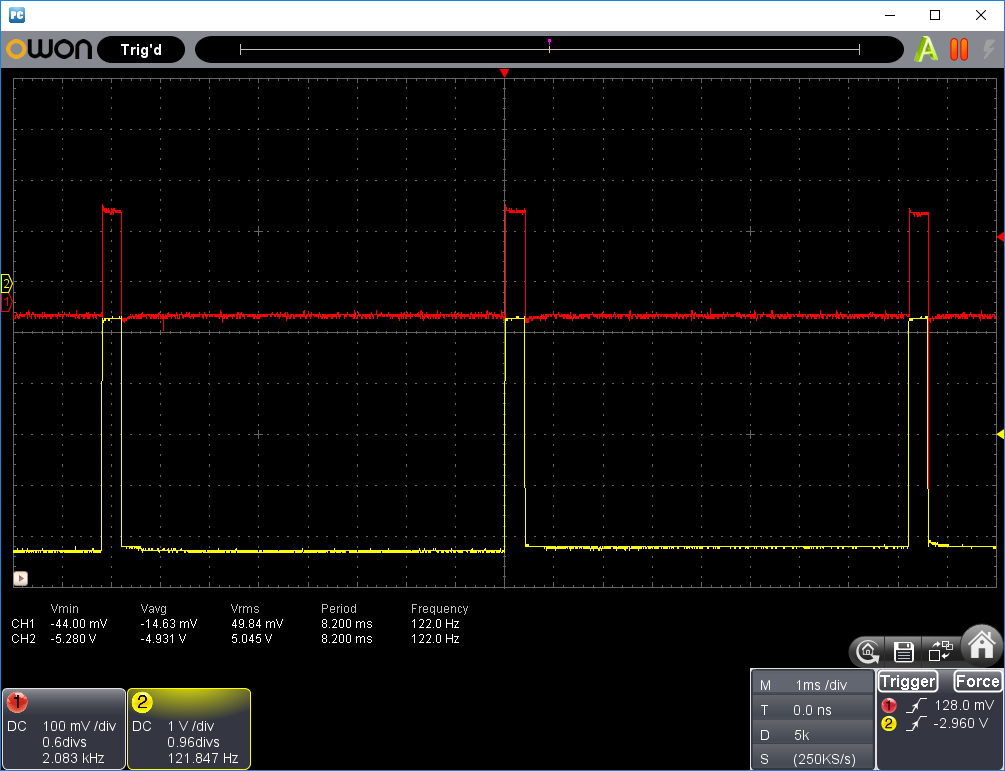
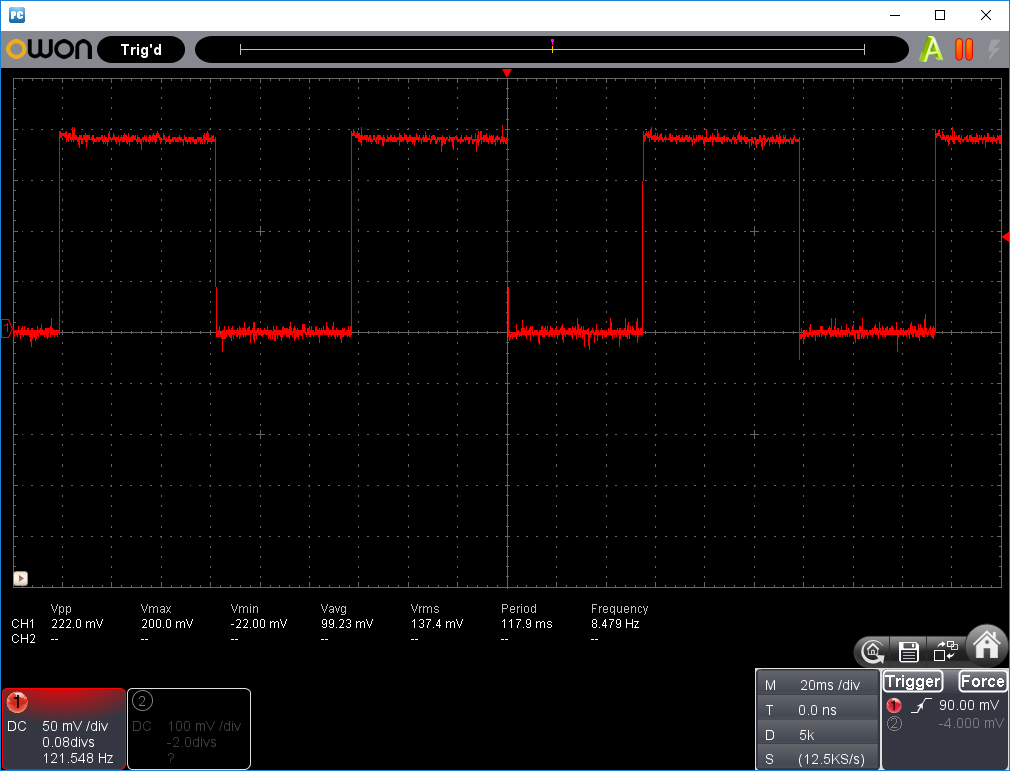
恾4-1丂duty斾1:16偺偲偒偺擖弌椡弌椡攇宍乮墿怓丗PWM擖椡揹埑丂愒怓丗弌椡揹棳丂墶幉丗1ms/div乯
恾4-2丂duty斾1:1偺偲偒偺擖弌椡弌椡攇宍乮墿怓丗PWM擖椡揹埑丂愒怓丗弌椡揹棳丂墶幉丗1ms/div乯
仸擖椡攇宍偼PWM惗惉儅僀僐儞偺搒崌忋弖娫揑偵OFF偲側偭偰偄傞
恾4-1丄恾4-2偵帵偡傛偆偵丄duty斾偑1:16偺応崌偱傕擖椡偵懳偡傞弌椡攇宍偵抶傟偼尒傜傟側偄丅乮恾4亅2偺傛偆側悢10兪s掱搙偺擖椡偺弖抐偵傕捛悘偟偰偄傞乯偮傑傝抶傟偼悢100兪s埲撪偵廂傑偭偰偄傞丅LED偺PWM惂屼偵栤戣側偔巊梡偱偒偦偆偩丅
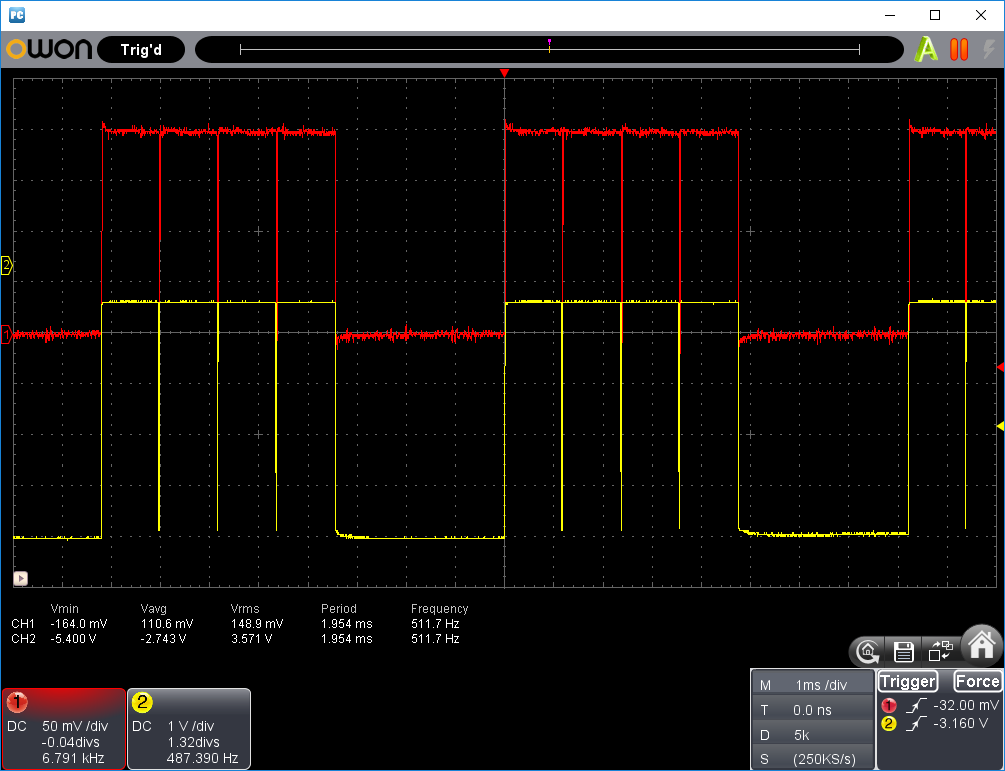
弌椡揹棳攇宍I_LED傪恾5偵帵偡丅忦審偼恾4-1偲摨偠偔丄duty斾1:1偲偟偨丅
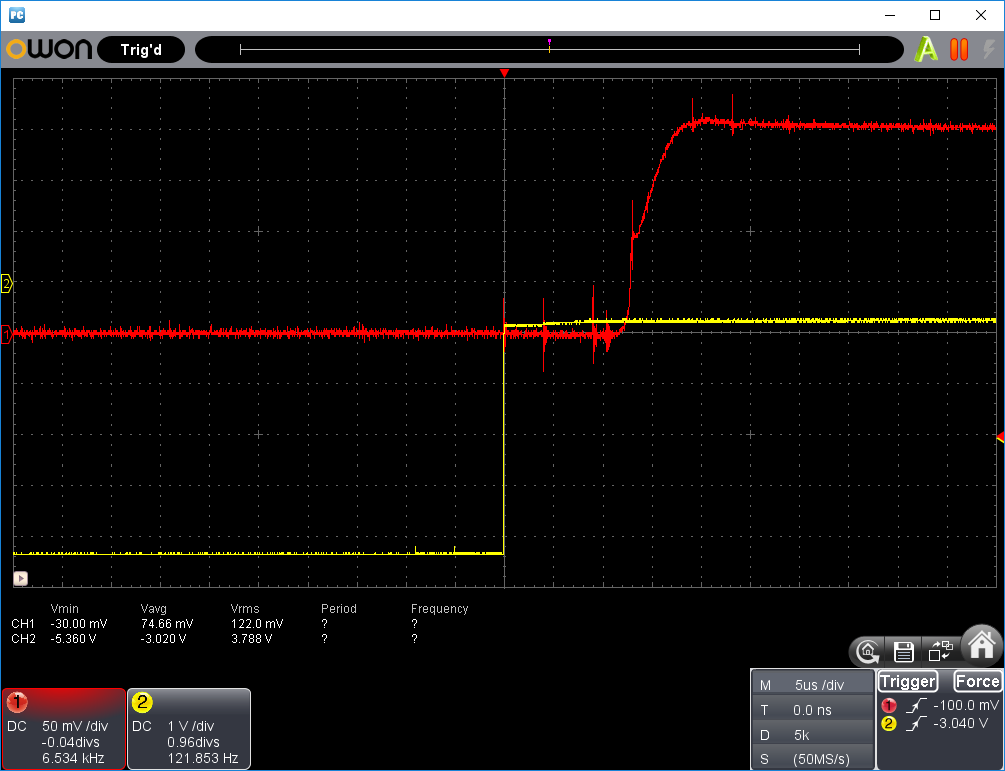
恾5丂duty斾1:16偺偲偒偺擖弌椡弌椡攇宍乮墿怓丗PWM擖椡揹埑丂愒怓丗弌椡揹棳丂墶幉丗5兪s/div乯
恾5偵帵偡傛偆偵丄擖椡揹埑偑棫偪忋偑偭偨捈屻10兪s娫偼弌椡揹棳偼懡彮僷儖僗僲僀僘傪敪偡傞掱搙偱掕忢忬懺傊偼慗堏偟側偄丅10兪s捈屻偐傜弌椡攇宍偑棫偪忋偑傝丄彮偟僆乕僶乕僔儏乕僩偟偨屻 僙儞僞乕偐傜5div乮25兪s乯偱傎傏掕忢抣 200mA 偲側傞丅恾4偱擖弌椡抶墑偼悢100兪s埲撪偩偲悇掕偟偨偑丄傎傏偦偺捠傝偩丅
僨乕僞僔乕僩偺婰弎偱偼抶墑偼11兪s偲偁傞偑丄偍偦傜偔擖椡棫偪忋偑傝奐巒 偲弌椡棫偪忋偑傝奐巒偺帪娫嵎偩傠偆丅
埲忋傛傝丄僷儚乕LED偺PWM惂屼偵巊梡偱偒偦偆側偙偲偑暘偐偭偨丅僲僀僘傕彮側偄丅拲堄揰偲偟偰丄恾1偺寢壥偱傕峫嶡偟偨傛偆偵揹尮揹埑傪崅偔偟偡偓側偄乮弌椡揹棳傪200mA偲偡傞応崌10V埲撪偲偡傞乯偙偲偩傠偆丅僲僀僘懳嶔傪峴偊偽儌乕僞乕偺惂屼偵傕巊偊偦偆偩丅
Back
崱夞偺應掕忦審偼壓婰偲偟偨丅
|
丒揹尮揹埑VDD偼庤帩偪偺埨掕壔揹尮偺5V乣20V
丒弌椡揹尮傪寛掕偡傞掞峈Rs偼1兌乮偮傑傝弌椡揹棳攇崅抣偼200mA偲側傞乯
丒LED偼埲慜I-V摿惈傪應掕偟偨EPISTER偺12WLED偺敀怓傪1屄巊梡偡傞
乮埲慜偺應掕寢壥偵傛傞偲丄200mA棳偡応崌弴曽岦揹埑偼3.0V掱搙昁梫乯 丒LED偵捈楍偵愙懕偟偨1兌偺揹棳應掕梡掞峈婍偺揹埑崀壓傪揹棳抣偵撉傒懼偊傞
乮忋弎偺傛偆偵弴曽岦揹棳3.0V偺偲偒偺LED偺掞峈抣偼15兌掱搙偱偁傝丄恾2偺傛偆側掕揹棳弌椡夞楬偱1兌掞峈偺憓擖偼應掕寢壥偵傎偲傫偳塭嬁側偄偲巚傢傟傞乯 丒LED惂屼梡偺PWM怣崋偼攇崅抣 5V丄廃攇悢 120Hz偲偟丄duty斾偼1:1偁傞偄偼1:16偲偡傞
乮LED偺惂屼偵巊梡偡傞掱搙偺廃攇悢丄duty斾偲偡傞乯
|
|
A 丒 EN_PWM傪忢偵ON偲偟揹尮揹埑VDD偑5乣20V偵曄壔偟偨応崌偺弌椡揹棳 I_LED偺抣
乮揹棳攇崅抣偑200mA偐傜曄壔偟側偄偙偲偺妋擣乯 B 丒 揹尮揹埑傪5V偲偟丄EN_PWM偺擖椡偺duty斾傪曄壔偝偣偨応崌偺弌椡揹棳I_LED偺抣
乮EN_PWM偺僷儖僗棫偪忋偑傝偵懳偟I_LED偺墳摎偑廫暘偵憗偄偙偲偺妋擣乯 C 丒 EN_PWM偺僷儖僗棫偪忋偑傝偵懳偡傞I_LED棫偪忋偑傝偺抶傟乮B偺徻嵶側應掕乯
|
A 丒 EN_PWM傪忢偵ON偲偟揹尮揹埑VDD偑5乣20V偵曄壔偟偨応崌偺弌椡揹棳 I_LED偺抣
弌椡揹棳攇宍I_LED傪恾3偵帵偡丅
恾3-1丂VDD=5V偺偲偒偺弌椡揹棳攇宍 乮廲幉丗50mV/div丂墶幉丗20ms/div乯
乮50mV/div乯恾3-2丂VDD=10V偺偲偒偺弌椡揹棳攇宍 乮廲幉丗50mV/div丂墶幉丗20ms/div乯
恾3-3丂VDD=15V偺偲偒偺弌椡揹棳攇宍 乮廲幉丗50mV/div丂墶幉丗20ms/div乯
恾3-4丂VDD=20V偺偲偒偺弌椡揹棳攇宍 乮廲幉丗50mV/div丂墶幉丗20ms/div乯
恾3-1乣3-3偵帵偡捠傝丄VDD偑15V埲壓偱偼弌椡揹棳偼廲4div偱堦掕側偺偱攇崅抣偼200mA偱堦掕偩丅僲僀僘傕彮側偄丅偨偩丄恾3-4偵帵偡傛偆偵VDD偑20V偺応崌丄duty斾偑1:1偱10Hz掱搙偱LED偑揰柵偟偨丅偍偦傜偔丄IC偺敪擬偵傛偭偰帺摦弌椡幷抐偑摥偄偨偲巚傢傟傞丅(幚嵺丄IC偵怗傟傞偲偐側傝擬偐偭偨)丂僷儚乕LED偵掕揹棳傪棳偡応崌丄揹尮揹埑偼10V埲撪偵梷偊傞偲埨慡偦偆偩丅
B丒揹尮揹埑傪5V偲偟丄EN_PWM偺擖椡偺duty斾傪曄壔偝偣偨応崌偺弌椡揹棳I_LED偺抣
弌椡揹棳攇宍I_LED傪恾4偵帵偡丅
恾4-1丂duty斾1:16偺偲偒偺擖弌椡弌椡攇宍乮墿怓丗PWM擖椡揹埑丂愒怓丗弌椡揹棳丂墶幉丗1ms/div乯
恾4-2丂duty斾1:1偺偲偒偺擖弌椡弌椡攇宍乮墿怓丗PWM擖椡揹埑丂愒怓丗弌椡揹棳丂墶幉丗1ms/div乯
仸擖椡攇宍偼PWM惗惉儅僀僐儞偺搒崌忋弖娫揑偵OFF偲側偭偰偄傞
恾4-1丄恾4-2偵帵偡傛偆偵丄duty斾偑1:16偺応崌偱傕擖椡偵懳偡傞弌椡攇宍偵抶傟偼尒傜傟側偄丅乮恾4亅2偺傛偆側悢10兪s掱搙偺擖椡偺弖抐偵傕捛悘偟偰偄傞乯偮傑傝抶傟偼悢100兪s埲撪偵廂傑偭偰偄傞丅LED偺PWM惂屼偵栤戣側偔巊梡偱偒偦偆偩丅
C 丒 EN_PWM偺僷儖僗棫偪忋偑傝偵懳偡傞I_LED棫偪忋偑傝偺抶傟乮B偺徻嵶側應掕乯
弌椡揹棳攇宍I_LED傪恾5偵帵偡丅忦審偼恾4-1偲摨偠偔丄duty斾1:1偲偟偨丅
恾5丂duty斾1:16偺偲偒偺擖弌椡弌椡攇宍乮墿怓丗PWM擖椡揹埑丂愒怓丗弌椡揹棳丂墶幉丗5兪s/div乯
恾5偵帵偡傛偆偵丄擖椡揹埑偑棫偪忋偑偭偨捈屻10兪s娫偼弌椡揹棳偼懡彮僷儖僗僲僀僘傪敪偡傞掱搙偱掕忢忬懺傊偼慗堏偟側偄丅10兪s捈屻偐傜弌椡攇宍偑棫偪忋偑傝丄彮偟僆乕僶乕僔儏乕僩偟偨屻 僙儞僞乕偐傜5div乮25兪s乯偱傎傏掕忢抣 200mA 偲側傞丅恾4偱擖弌椡抶墑偼悢100兪s埲撪偩偲悇掕偟偨偑丄傎傏偦偺捠傝偩丅
僨乕僞僔乕僩偺婰弎偱偼抶墑偼11兪s偲偁傞偑丄偍偦傜偔擖椡棫偪忋偑傝奐巒 偲弌椡棫偪忋偑傝奐巒偺帪娫嵎偩傠偆丅
埲忋傛傝丄僷儚乕LED偺PWM惂屼偵巊梡偱偒偦偆側偙偲偑暘偐偭偨丅僲僀僘傕彮側偄丅拲堄揰偲偟偰丄恾1偺寢壥偱傕峫嶡偟偨傛偆偵揹尮揹埑傪崅偔偟偡偓側偄乮弌椡揹棳傪200mA偲偡傞応崌10V埲撪偲偡傞乯偙偲偩傠偆丅僲僀僘懳嶔傪峴偊偽儌乕僞乕偺惂屼偵傕巊偊偦偆偩丅
Back